TL;DR
- Industrial robots have evolved from luxury technology into essential everyday autonomous manufacturing solutions.
- Seven key robot types each offer unique strengths suited to specific industrial applications and environments.
- Articulated and SCARA robots dominate assembly lines due to their precision and operational flexibility.
- Collaborative robots work safely alongside humans, enhancing productivity without replacing human judgement entirely.
- Cerexio’s solutions universally connect and optimise all industrial robot types under one intelligent platform.
The way industrial practitioners talk about robots has changed dramatically over the past decade.
What was once considered a technological luxury reserved for large-scale conglomerates is now an everyday autonomous solution deployed across factories, warehouses, and production lines of all sizes. As the machine-dependent industrial world continues to evolve rapidly, corporations are increasingly relying on diverse types of industrial robots to stay competitive.
The deployment of industrial robots, paired with intelligent software solutions, has allowed technology-driven companies to make smarter operational decisions, boost factory performance, increase productivity, and avoid costly failures and inefficiencies from a single control console.
This article will walk you through the 7 main types of industrial robots used by modern industrial establishments. You will also discover the software solutions that work alongside these robots to help you generate more value with fewer investments.
What Are the 7 Types of Industrial Robots Your Industrial Operations Cannot Afford to Overlook?
When most people hear the word “robot,” they picture humanoids or science-fiction cyborgs. In reality, industrial robots rarely resemble humans, though wearable robotic counterparts do exist in certain applications.
The seven most widely used industrial robots are Articulated Robots, Cartesian Robots, Collaborative Robots, Cylindrical Robots, Delta Robots, Polar Robots, and SCARA Robots. Each serves a distinct operational purpose, and understanding their differences is critical to deploying them effectively.
Here is a detailed breakdown of each type.
Articulated Robots
Articulated Robots are among the most common and longest-serving robots in the industrial sector, and they remain highly relevant despite decades of newer robotic innovations.
These robots consist of metallic segments connected by rotary joints, giving them a structure closely resembling the human arm. Each joint, also referred to as an axis, adds a degree of freedom, and the more axes a robot has, the more complex its range of motion becomes.
- Where they are used: Articulated Robots are favoured by manufacturers for their exceptional flexibility. Their human arm-like movement makes them ideal for flexible production line operations. Common applications include material handling, part transferring, packaging, arc welding, palletising, and machine loading.
- Strengths: Greater freedom of movement than most other robot types, minimal floor space requirement, and easy alignment across multiple planes.
- Limitations: They require complex programming and kinematics, need a professional robot controller to operate, and are generally slower in speed compared to other industrial robots.

Cartesian Robots
Cartesian Robots are purpose-built for transferring heavy objects with precision across defined axes, and they excel at it consistently.
These robots operate using a well-geared overhead structure that controls motion across horizontal and vertical planes via a robotic arm. The end effector, the tool at the tip of the arm, is selected based on the specific function required. The overhead structure can be configured to move along x-y-z or x-y axes depending on operational needs.
- Where they are used: Cartesian Robots are applied across a wide range of industrial tasks including process-to-process transfers, pick and place operations, assembly, sealant and adhesive applications, palletising, depalletising, CNC machine tooling, precision spot welding, dispensing, sorting, cutting, and material handling.
- Strengths: High payload carrying capacity, cost-efficient and easy to programme, superior precision and accuracy, and a compact operational footprint.
- Limitations: Movement is restricted to defined linear axes, making them less adaptable to complex, multi-directional tasks compared to articulated counterparts.

Collaborative Robots
Collaborative Robots, commonly known as Cobots, represent a fundamentally different philosophy in industrial robotics: working with humans rather than replacing them.
Cobots are designed to operate directly alongside human workers with agility, effectiveness, and efficiency. They bring productivity, flexibility, and security to operational environments without removing the human element from the equation.
- Where they are used: Cobots are primarily deployed for handling small parts, completing simple repetitive tasks, product inspection, dispensing, assembling, tending, finishing, welding, and quality checks. These are tasks that benefit from both robotic consistency and human intuition.
There are four major categories of collaborative robots, classified by their interaction model: Hand Guiding, Speed and Separation, Safety Monitored Stop, and Power and Force Limiting.
- Strengths: They enhance human productivity without full automation, offer flexibility and adaptability to changing tasks, and are safe to operate in shared human-robot environments.
- Limitations: They require a large, restricted working area to ensure human safety, are less effective without human supervision or assistance, and operate at slower speeds particularly in safety-advanced environments.

Cylindrical Robots
Cylindrical Robots operate within a cylindrical work envelope, defined by three axes of motion, one circular and two linear, creating a coordinate system that suits specific industrial applications very well.
Some advanced versions include a robotic wrist at the rotary arm, adding extra degrees of freedom for greater precision during operations.
- Where they are used: These robots are commonly applied in machine tool handling, die-casting, spot welding, assembly operations, palletising, investment casting, coating applications, packaging, and injection moulding.
- Key specifications: Payload capacity ranging from 5KG to 250KG and an average working speed of 1,000 mm per second.
- Strengths: Capable of handling a wide range of payloads and suited to operations requiring wide ranges of motion.
- Limitations: Precision and repeatability are limited to the direction of rotary action, mechanical rigidity is affected by the nature of its coordinate system, and it lacks sophisticated directional control compared to more advanced robot types.
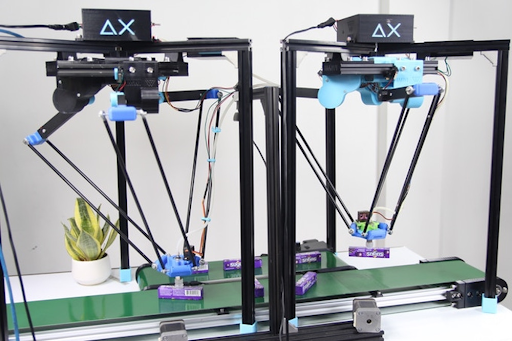
Delta Robots
Delta Robots are instantly recognisable on the factory floor. Their three-arm spider-like structure sets them apart from every other robot type, and their performance matches their distinctive appearance.
Built for speed, these parallel robots feature three arms meeting at universal joints at the base, specifically engineered for high-velocity picking and packaging tasks. With outstanding agility, precision, and acceleration, Delta Robots can execute over 300 picks per minute.
- Where they are used: Delta Robots are widely deployed in the medical, pharmaceutical, food and beverage, and packaging industries, anywhere that fast, precise, and repetitive pick and place operations are required.
- Available variants include: Delta with 4 degrees of freedom, Delta with 2 degrees of freedom, Delta Cube, Pocket Delta, Linear Delta, and Delta Direct Drive.
- Strengths: Smaller operational footprint, high productivity and exceptional speed, lightweight design that enables faster movement, and strong safety assurance during operations.
- Limitations: Signal fluctuations or changes smaller than the step size can cause disconnection and operational stoppage, so power and control systems must remain consistently stable at all times.
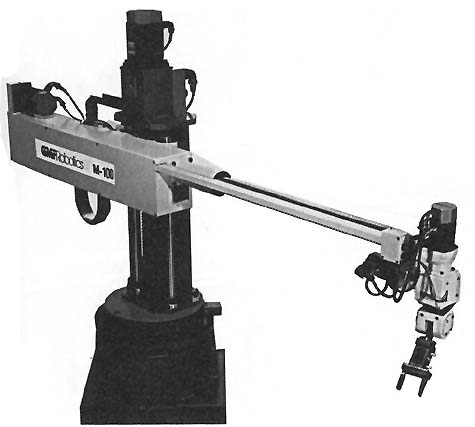
Polar Robots
Polar Robots, also referred to as Spherical Robots, are one of the oldest robot types in existence, first developed in 1950. Yet despite their long history, they continue to hold their own against modern robotic innovations due to their remarkable ability to boost productivity.
Their defining characteristic is a spherical work envelope, created by two rotary joints and one combined joint, giving them a 360-degree range of motion that many newer robot types struggle to match.
- Where they are used: Polar Robots are applied in assembly operations, machine tool tending, die-cast processes, arc and gas welding, painting systems, spot welding, forging, and glass handling.
- Strengths: 360-degree range of motion, capable of managing large work volumes, require comparatively less floor space, and offer flexible reach across a wide operational area.
- Limitations: They cannot reach directly above themselves, have limited vertical reach due to structural design, tend to repeat unnecessary rotary movements during operation, and would benefit significantly from more sophisticated control systems.

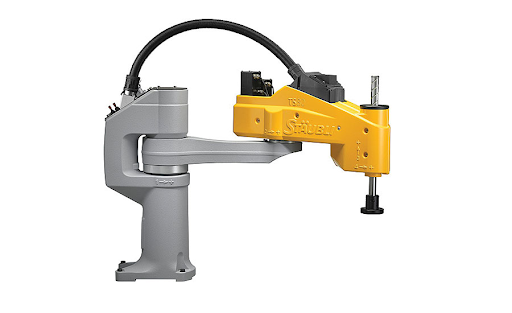
SCARA Robots
SCARA, which stands for Selective Compliance Articulated/Assembly Robot Arm, is a robot type built around a deliberate design principle: compliant along the X-Y axis but rigid along the Z-axis. This specific characteristic makes SCARA robots exceptionally well suited to high-speed assembly line tasks.
First deployed in industrial assembly lines in 1981, SCARA robots have remained a staple of production environments for over four decades.
- Where they are used: SCARA robots are primarily used for high-speed pick and place operations, screw tightening, product inspection, conveying and stacking, laser engraving, and material transferring.
- Strengths: Exceptional precision driven by their rigid Z-axis design, outstanding speed when cycle times are critical, a smaller footprint compared to Delta and Cartesian robots, and ideal suitability for high-volume repeatable operations.
- Limitations: Limited flexibility and dexterity compared to other robot types, and they can only carry light payloads typically between 2KG and 10KG.
How Does Cerexio Make Industrial Robots Smarter and More Efficient?
Cerexio’s industrial solutions are engineered to interconnect, control, optimise, and maximise the potential of all industrial robot types under a single unified platform.
Whether you are operating Articulated Robots, Cartesian Robots, Collaborative Robots, Cylindrical Robots, Delta Robots, Polar Robots, or SCARA Robots, Cerexio’s solutions are universally compatible across all types.
The robot fleets deployed in manufacturing environments are enhanced through a powerful combination of Cerexio PLC and Instrumentation Solution, Cerexio MES 4.0 and Digital Twin Technology, and Advanced Predictive and Prescriptive Analytics.
Beyond manufacturing, Cerexio’s Smart Asset Management Solutions also serve asset-intensive industries including Water, Wastewater, Road, Oil and Gas, and more, extending the longevity, resilience, and reliable performance of thousands of industrial robots from one centralised screen.
To learn how Cerexio’s Smart Asset Management and MES solutions can make your industrial robots smarter, event-driven, and sustainable, reach out to the Cerexio team directly.
Industrial Robots and You
Understanding the distinct capabilities and limitations of each industrial robot type is not just useful academic knowledge. It is a strategic advantage for any industrial practitioner managing large robotic fleets.
Choosing the right robot for the right application directly impacts efficiency, quality standards, operational hours, capital costs, and long-term profitability. The wrong choice, on the other hand, can be one of the most costly decisions a robot-dependent operation makes.
Industrial robots are the future of manufacturing, but that future belongs to the practitioners who take the time to understand them fully before investing. If you are ready to optimise your industrial robot network with intelligent software support, Cerexio’s universally compatible solutions are built to help you get the most from every robot on your floor.
FAQs
Articulated Robots are among the most widely used industrial robots globally. Their human arm-like range of motion, flexibility across multiple planes, and minimal floor space requirements make them a versatile choice for a broad range of manufacturing tasks, from welding and palletising to material handling and machine loading.
Unlike most industrial robots that operate independently in designated zones, Collaborative Robots (Cobots) are specifically designed to work directly alongside human workers. They are equipped with safety features that allow them to operate in shared spaces, making them ideal for tasks that benefit from a combination of robotic consistency and human judgement such as inspection, assembly, and finishing.
Delta Robots are the leading choice for high-speed pick and place tasks, capable of completing over 300 picks per minute. Their lightweight three-arm structure, small footprint, and exceptional acceleration make them the preferred robot type in the food, pharmaceutical, and packaging industries where speed and precision are both critical.
Yes. Despite being first developed in 1950, Polar Robots continue to be used in modern industrial settings. Their 360-degree range of motion, large work volume capacity, and comparatively small floor space requirement still offer genuine operational advantages, particularly in welding, forging, and assembly applications where wide-reach flexibility is needed.
Cerexio’s industrial solutions are universally compatible with all major robot types including Articulated, Cartesian, Collaborative, Cylindrical, Delta, Polar, and SCARA robots. Through a combination of MES 4.0, Digital Twin Technology, PLC and Instrumentation Solutions, and Advanced Predictive Analytics, Cerexio enables manufacturers to monitor, control, and optimise their entire robot fleet from a single centralised platform.